Un controlador o regulador PID es un dispositivo que permite controlar un proceso para que alcance el estado de salida deseado. Recordemos, en este punto, que todo proceso tiene entradas y salidas. A modo de ejemplo, si tenemos un controlador para el trabajo con hornos industriales, esto podría quedar expresado así:
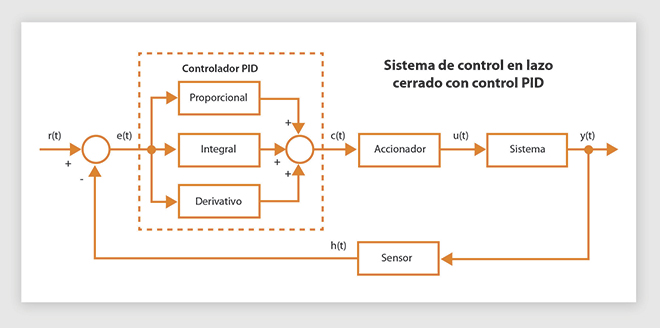
El controlador PID está compuesto de tres elementos que proporcionan una acción Proporcional, Integral y Derivativa. Estas tres acciones son las que dan nombre al controlador PID.
Señal de referencia y señal de error
Se denomina señal de referencia, al estado que se desea conseguir en la salida de un sistema o proceso. En un sistema de control de temperatura, por ejemplo, la referencia será la temperatura deseada o ideal para un horno, y la salida será la temperatura real que tienen los hornos controlados. Dado que es altamente probable que los hornos no tengan exactamente la temperatura deseada, existe una tercera variable, la señal de error, la cual indica al controlador la diferencia que existe entre la temperatura que se quiere conseguir o referencia r(t) y el estado real del sistema medido por el sensor, señal h(t).
Si al realizar esta comparación se verifica que la señal de error es importante, significa que el estado del sistema se encuentra lejos del estado de referencia deseado. Si, por el contrario, el error es pequeño, significa que el sistema ha alcanzado el estado deseado.
Acción de Control Proporcional
Como su nombre indica, esta acción de control es proporcional a la señal de error. Internamente, la acción proporcional multiplica la señal de error por una constante e intenta minimizar el error del sistema. Cuando el error es grande, la acción de control es grande y tiende a minimizar este error.
Aumentar la acción proporcional tiene efectos deseables, tales como aumentar la velocidad de respuesta y disminuir el error del proceso, pero también tiene el efecto negativo de aumentar la inestabilidad del sistema, razón por la cual esta acción debe buscar un punto de equilibrio en el que se consiga suficiente rapidez de respuesta del sistema y reducción del error, sin que el sistema sea demasiado inestable.
Acción de Control Derivativa
Esta acción de control es proporcional a la derivada de la señal de error o, dicho de otra forma, a la velocidad del error. Cuando el sistema o proceso que estamos controlando se mueve a una velocidad alta hacia el punto deseado (valor de referencia), el sistema se pasará de largo debido a su inercia, produciendo sobreimpulsos y oscilaciones. Por ejemplo, si la temperatura de un horno está a 120°C en circunstancias que la deseada es de 125°C, el controlador tomará acciones para subir rápidamente la temperatura de ese horno, generando que muy probablemente no solo la alcance, sino que la sobrepase. Para evitar este problema, el controlador debe reconocer la velocidad a la que el sistema se acerca al valor de referencia deseado para poder frenarle con antelación, a medida que se acerque a la referencia deseada y evitar que la sobrepase.
Al aumentar la constante de control derivativa se obtiene un aumento en la estabilidad del sistema controlado, disminuye un poco la velocidad del sistema, pero el error en el proceso permanecerá igual. Por lo tanto, esta acción de control sirve para estabilizar una respuesta que oscile demasiado.
Acción de Control Integral
Como su nombre lo indica, esta acción de control calcula la integral de la señal de error, es decir, corresponde a la suma o acumulación de la señal de error. A medida que pasa el tiempo, pequeños errores se van sumando para hacer que la acción integral sea cada vez mayor, consiguiéndose reducir el error del proceso que está en producción. La desventaja de utilizar la acción integral es que esta añade una cierta inercia al sistema y, por lo tanto, lo hace más inestable.
Sintonización manual de un controlador PID
Ahora que hemos revisado las acciones que puede ejecutar un controlador PID, podemos aplicar algunas reglas sencillas para sintonizar este controlador manualmente:
Acción Proporcional
Se aumenta poco a poco la acción proporcional para disminuir el error (diferencia entre el estado deseado y el estado conseguido) y para aumentar la velocidad de respuesta.
Si se alcanza la respuesta deseada en velocidad y error, el PID ya está sintonizado.
Si el sistema se vuelve inestable antes de conseguir la respuesta deseada, se debe aumentar la acción derivativa.
Acción Derivativa
Si el sistema es demasiado inestable, se aumentará poco a poco la constante derivativa para conseguir de nuevo estabilidad en la respuesta.
Acción Integral
En el caso de que el error del sistema sea mayor que el deseado, se aumentará la constante integral hasta que el error se minimice con la rapidez deseada.
Si el sistema se vuelve inestable antes de conseguir la respuesta deseada, se debe aumentar la acción derivativa.
Saturación y límites del controlador PID
Se debe considerar que en los procesos industriales existen limitaciones que reducen la capacidad del controlador para conseguir la respuesta deseada, donde por mucho que se aumente la acción proporcional llegará un momento en el que el accionador se saturará. Por ejemplo, en un proceso de control de temperatura, la resistencia calefactora podrá suministrar potencia hasta los 2.000 W.
Si el controlador intenta entregar más potencia para conseguir más velocidad de calentamiento, no se podrá y el sistema no conseguirá mayor rapidez.
Por lo tanto, hay que tener en cuenta que la velocidad de respuesta de los sistemas reales tiene ciertos límites que el control no podrá superar.
Artículo gentileza de Veto. / www.veto.cl